Laboratory Equipment
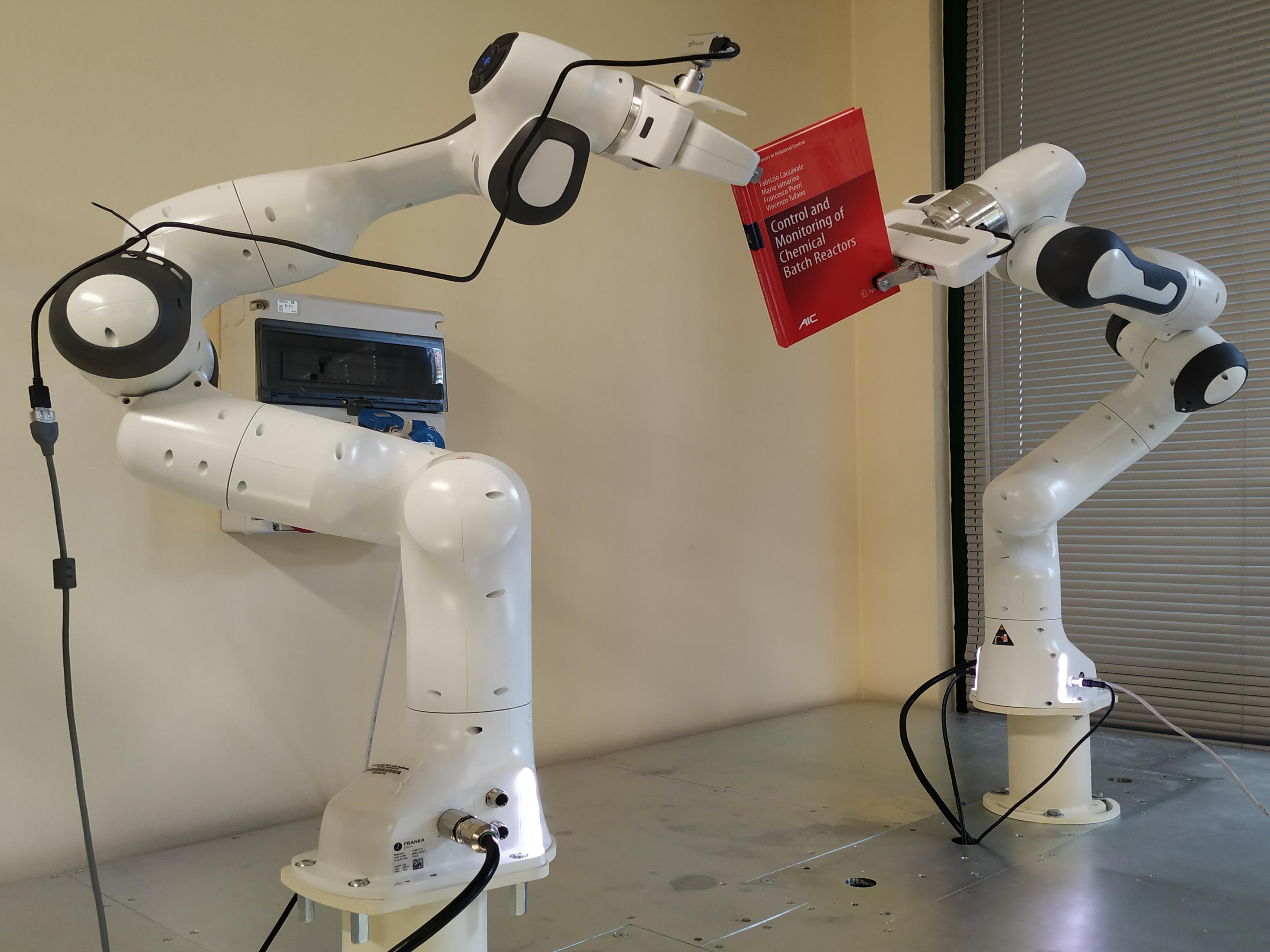
The Franka Emika Panda is a 7 DoFs robot manipulator, inspired by human arm, equipped with torque sensors in all axes. It is collaborative lightweight robot system designed specifically to assist humans.
The Franka Control Interface (FCI) allows a fast and direct low-level bidirectional connection to the Arm and Hand. It provides the current status of the robot and enables its direct control with an external workstation PC connected via Ethernet.
An open source C++ interface provides real-time control at 1 kHz with 5 different interfaces:
- Gravity & friction compensated joint level torque commands.
- Joint position or velocity commands.
- Cartesian pose or velocity commands.
At the same time, it provides 1 kHz measurements of:
- Measured joint data, such as the position, velocity and link side torque sensor signals.
- Estimation of externally applied torques and wrenches.
- Various collision and contact information.
The robot model library also provides:
- Forward kinematics of all robot joints.
- Jacobian matrix of all robot joints.
- Dynamics: inertia matrix, Coriolis and centrifugal vector and gravity vector.
The Vicon Vero is an optical motion capture system widely used in a variety of fields where high precision recording of human motion and moving objects is required.
Our laboratory is equipped with 8 Vicon Vero (v2.2) cameras, which capture the movement of objects fitted with reflective markers that can be placed on the human body, objects or animals. These reflective markers reflect the light emitted by the cameras.
Thanks to its ability to capture and analyze movement with great precision, the Vicon system can reconstruct the movements of objects or living beings equipped with reflective markers up to an accuracy of 10-4m.
The technical specifications for the Vero v2.2 model are:

- Resolution: 2.2MP (2048 x 1088).
- Frame Rate (Full Frame): 330 FPS.
- Lens: Vicon 6-12mm varifocal.
- Minimum Field of View (H x V): W: 98.1 x 50.1 degrees, T: 44.1 x 23.6 degrees.
- Strobe: 850nm 'IR'.
- Camera External Dimensions: HxWxD: 83 x 80 x 135mm.
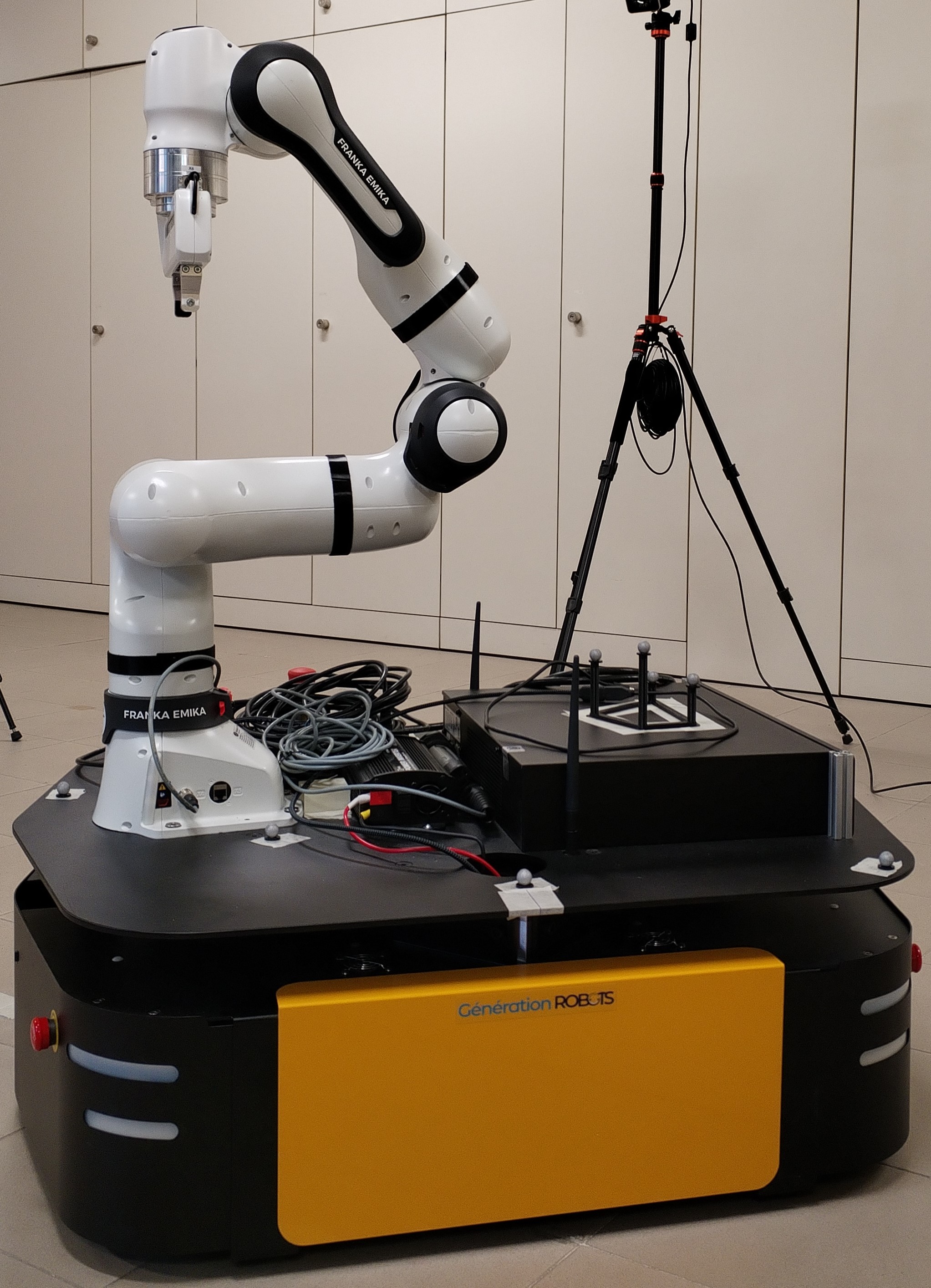
The Clearpath Robotics Ridgeback is an indoor omnidirectional platform designed to move manipulators and other heavy payloads with ease and precision.
The exterior of Ridgeback includes:
- Stop, Reset, and Power buttons.
- Body Lights.
- User Bay.
- Payload Integration Plate. Ridgeback is built around a computer running Ubuntu (Intel-based computer or Jetson developer kit), paired with a 32-bit microcontroller MCU, and has been integrated with a Franka Emika Panda Robot Manipulator. The MCU handles I/O, power supply monitoring, and motor control, as well as supplying data from the integrated IMU. The communication channel between the MCU and computer is a Gigabit Ethernet connection. Ridgeback is equipped with advanced navigation and mapping capabilities, including SLAM (Simultaneous Localization and Mapping) algorithms, laser scanners, and IMU sensors. These features enable the robot to autonomously navigate and map its surroundings, avoiding obstacles and efficiently planning its path.

-
The Hololens 2 is a Head Mounted Display produced by Microsoft.
It runs the Windows Holographic operating system and is equipped with a Qualcomm Snapdragon 850
ARM64 CPU with 64 GB of internal storage and 4GB of RAM. It has got a
dedicated processor for holograms visualization (HPU 2.0). This powerful hardware enables smooth performance and responsiveness,
allowing for seamless rendering of complex holographic content and real-time spatial mapping of the user's environment.
With its combination of advanced optics, intuitive interaction, comfort, and powerful performance,
HoloLens 2 is well-suited for a wide range of applications, including design, education, and enterprise solutions.
The Crazyflie 2.0 is a versatile open source flying development platform that only weighs 27g and is equipped with low-latency/long-range radio. The Crazyflie 2.0 features 4 x 7mm coreless DC-motors
that give the Crazyflie a maximum takeoff weight of 42g. This capacity enables it to carry multiple expansion decks. They are equipped with:

- Loco Positioning System, a local positioning system that is used to find the absolute 3D position of objects in space. It is similar to a miniature GPS system. The base of the system is a set of Anchors that are positioned in the room (compare to the satellites in GPS), they are the reference. The other part of the system is one or more Tags (compare to the GPS receiver) that are mounted on the Crazyflies to be tracked. By sending short high frequency radio messages between the Anchors and Tags, the system measures the distance from each Anchor to the Tags and calculates the position of the Tags from that information. All information needed to calculate the position is available in the Tag which enables position estimation on board of the Crazyflie.
- Laser ranging to measure the distance to the ground.
- Optical flow sensor. The VL53L1x ToF sensor measures the distance to the ground with high precision and the PMW3901 optical flow sensor measures movements in relation to the ground.
The AscTec Pelican is a quadrotor aerial vehicle. It is equipped with a high performance onboard processors, and a wide set of sensors: 3 accelerometers, 3 gyroscopes, 3 magnetometer, GPS receiver, an optical flow sensor, 3 high quality cameras and a precise laser scanners. It is programmable via AscTec SDK and AscTec Simulink toolkit. All in all this flight system is the most flexible and powerful of the Ascending Tecnologies fleet.

The Khepera III is a differential wheeled mobile robot produced by K-Team Corporation. The AREA lab has two Khepera III robots. Each robot has a Korebot II board with a standard embedded Linux Operating System for quick and easy autonomous application development. The equipment of the robots is composed by infrared sensors, sonar and a wifi communication device. Moreover, the robots can be equipped with on-board usb webcam, gripper and laser range finder. The Khepera III are used for robotic experiments on navigation, multi-agents system control and behavioral control.

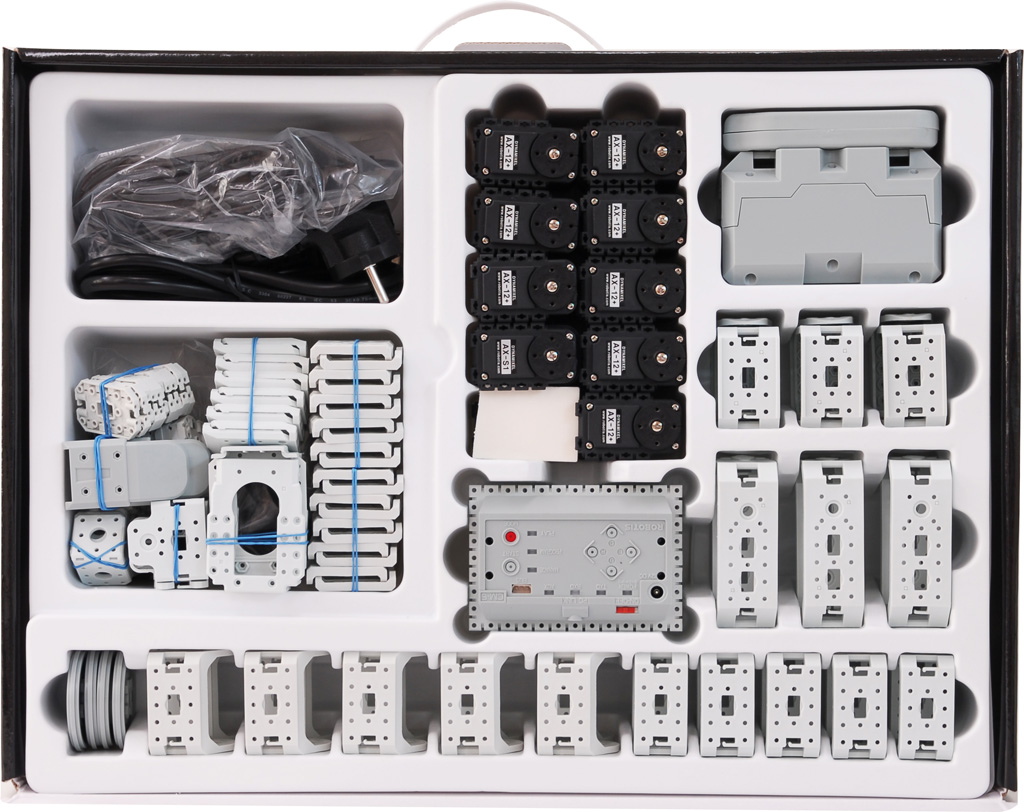
The Bioloid Comprehensive Kit is composed of block-shaped parts which can be assembled in various configurations to build user's designed robots. Furthermore, Robotis provides software that allows to connect assembled robots to PC and programming them. User designed robots can be programmed by using:
- The Behaviour Control Programmer(a visual high level language);
- C user written routines (based on Robotis C provided libraries).
The main parts componing the kit are
- Main Controller CM-5 that acts as the brain of the robot by controlling actuators, reading sensors, establishing connection between robot and PC;
- Dynamixel AX-12 actuator modules which acts as robot's joints or wheels if endless turn mode is enabled;
- Dynamixel sensor modules AX-S1 that are able to detect distance ,brightness, heat and sound.
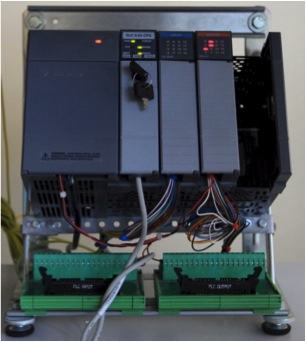
Programmable logic controllers (PLC) are computers used for automation of industrial processes, designed to manage multiple input and output points. In the AREA lab there are two PLC systems Allen Bradley SLCTM 550 with 16 digital inputs and 16 digital outputs. Each PLC is interfaced with a process simulator, built in Visual Basic and running on a personal computer. The PLCs can be programmed in Ladder by using the software RSLogixTM 500.
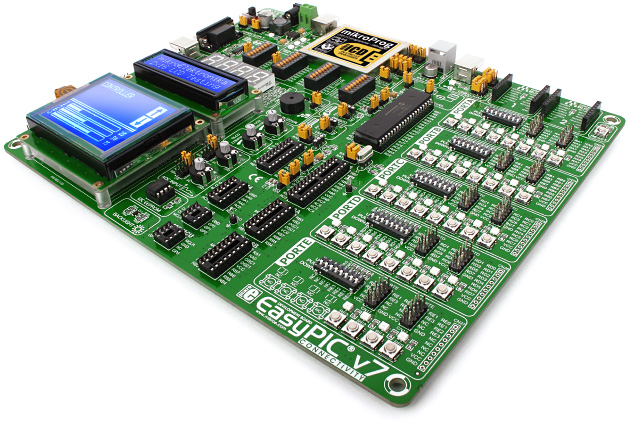
EasyPIC v7 is a PIC development board which includes PIC18F45K22 device, USB 2.0 programmer (MikroProgTM ), on board led display, buzzer, 36 push buttons switches and 36 leds. MikroProgTM is a fast USB 2.0 programmer with mikroICDTM hardware In-Circuit Debugger which allows to execute programs on the host PIC microcontroller and view variable values. It supports over 250 microcontrollers.